

2024-04-29 07:12:05
PWM通过占空比来控制舵机,所谓PWM就是通过程序控制单片机IO口按照一定的时间规律输出高电平或低电平龙8long8唯一官方网站,具体可以上网查阅
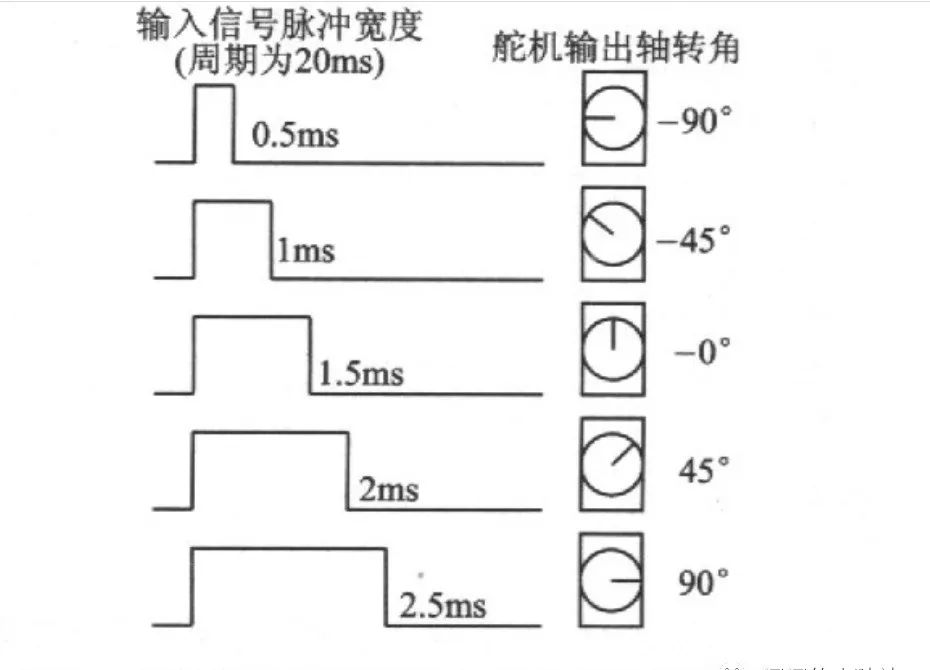
对于t=0.5 - 2.5ms的产生,写程序时我们可以采用全局变量。让全局变量等于525之间,因为舵机的一个计数周期是0.1ms,这样全局变量的525正好就是0.5~2.5ms
PWM波产生思路:将信号管脚线初始化为低电平,然后写一个while循环,在循环中将该管脚置为为高电平,延时,再拉低为低电平,如此循环产生PWM波,以高电平产生时间来控制舵机转动角度。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,long8唯一官网在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来龙8long8唯一官方网站,如此往复实现PWM信号输出到舵机。用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
为保证软件在定时中断里采集其他信号,并且使发生PWM信号的程序不影响中断程序的运行(如果这些程序所占用时间过长,有可能会发生中断程序还未结束,下次中断又到来的后果),所以需要将采集信号的函数放在长定时中断过程中执行,也就是说每经过两次中断执行一次这些程序,执行的周期还是20ms。
脉冲计数可以利用51单片机的内部计数器来实现,但是从软件系统的稳定性和程序结构的合理性看,宜使用外部的计数器,还可以提高CPU的工作效率。
地址:宁波市鄞州区中钟公庙街道天童北路1393号322室 Copyright © 2012-2023龙8-long8唯一官方网站 版权所有
ICP备案编号:辽ICP备14525020号